Recently, I am learning with ROS.
Environment
I am using Mac with Parallels Desktop. And install ubuntu-14.04.5-desktop-amd64.iso
Here are some links:
- Parallels Desktop: https://www.parallels.com/products/desktop/trial/
- Ubuntu 14.04.5 LTS: http://releases.ubuntu.com/trusty/
Problem
When I am using turtlebot_gazebo package, firstly I install through sudo apt-get install ros-indigo-turtlebot-gazebo. Then, to test my installation, I run roslaunch turtlebot_gazebo turtlebot_world.launch. And everything works perfect.
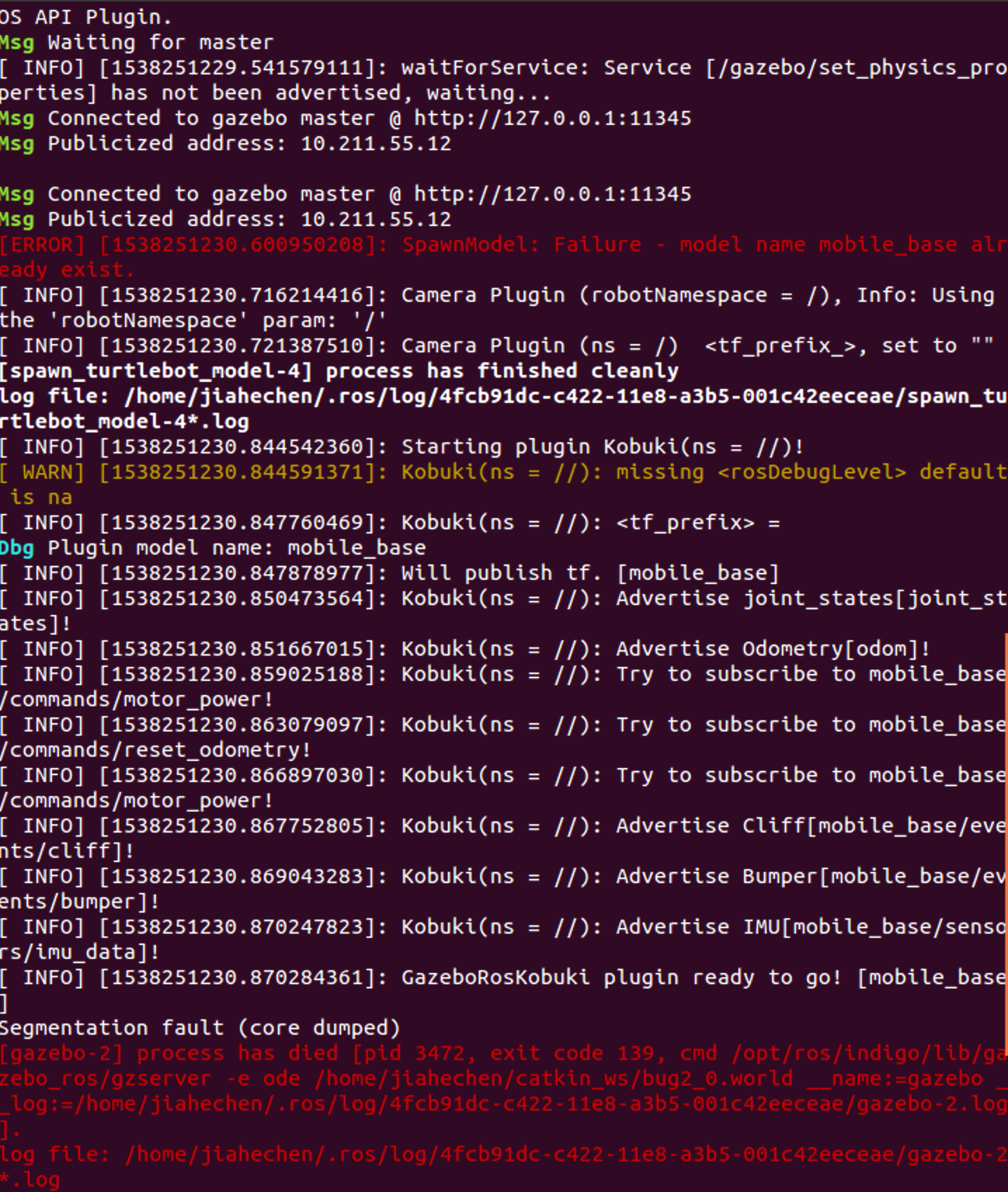
Then I want to change the world model from the standard world by specifying our own world. So instead of the previous command, I run
roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=$PWD/my.world
NOTE: use an absolute address for the world_file parameter
Then I will got some problem…
Solution
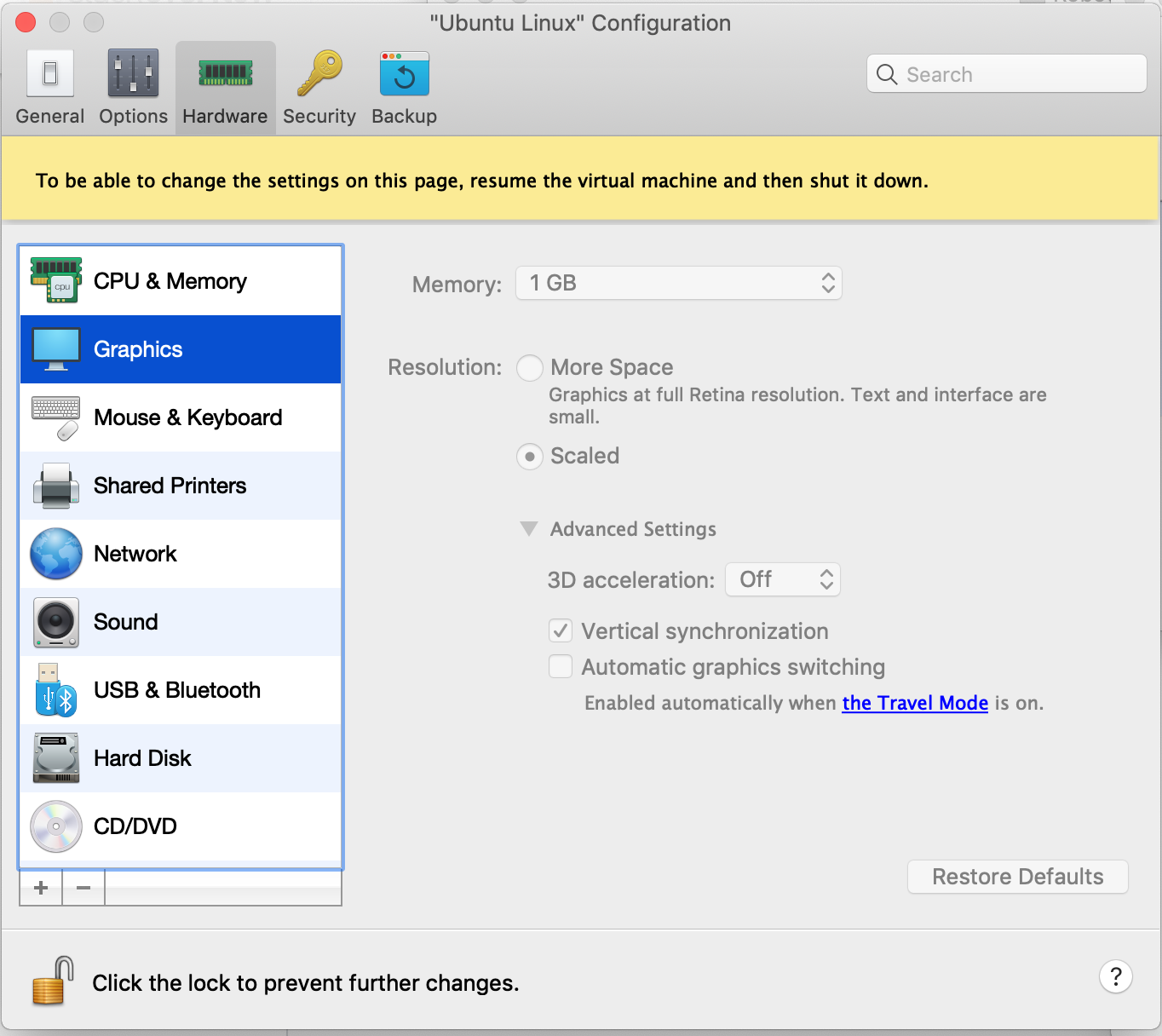
Open your Virtuel machine setting, and uncheck 3D acceleration.
I figuring this problem out for almost one day… Hope it works for you as well!
:D